
Aktualności
 Dom / Aktualności / Wiadomości branżowe / Jak wybrać odpowiedni poziomy napęd obrotowy do swojego zastosowania?
Dom / Aktualności / Wiadomości branżowe / Jak wybrać odpowiedni poziomy napęd obrotowy do swojego zastosowania? Jak wybrać odpowiedni poziomy napęd obrotowy do swojego zastosowania?
 2026.05.13
2026.05.13
 Wiadomości branżowe
Wiadomości branżowe
Wybór odpowiedniego poziomego napędu obrotowego to jedna z tych decyzji, które na pozór wydają się proste, ale szybko ujawniają warstwy złożoności, gdy zagłębisz się w wymagania aplikacji. Zły dobór nie tylko skutkuje gorszymi wynikami — przedwcześnie ulega awariom, powoduje obciążenia konserwacyjne, a w systemach o krytycznym znaczeniu dla bezpieczeństwa może powodować kosztowne przestoje lub wypadki. W tym przewodniku omówiono wszystkie istotne zmienne związane z wyborem, dając inżynierom i specjalistom ds. zaopatrzenia praktyczne ramy umożliwiające podjęcie właściwej decyzji za pierwszym razem.
Co właściwie robi poziomy napęd obrotowy
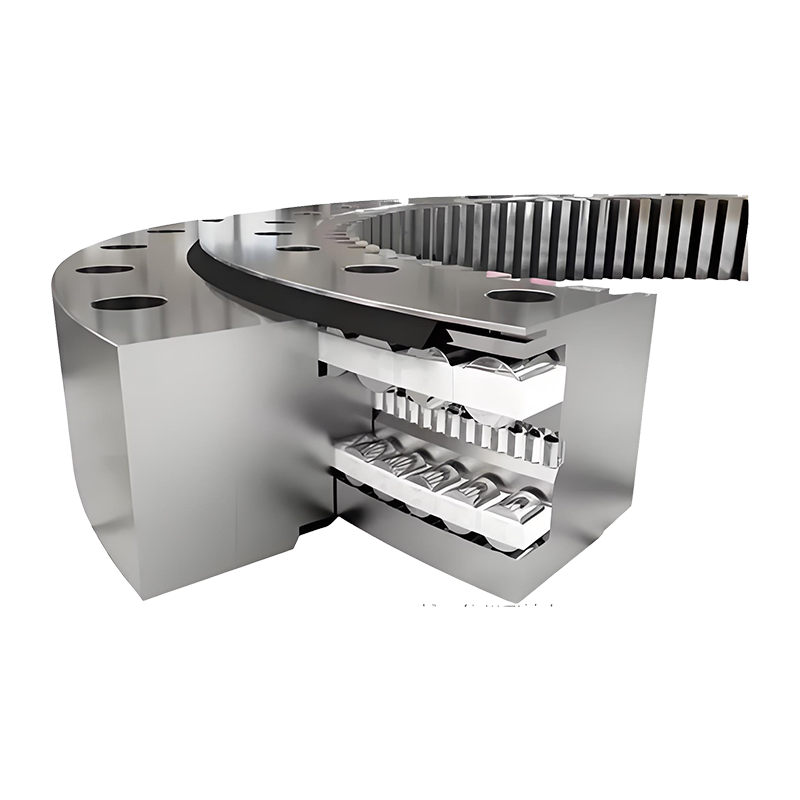
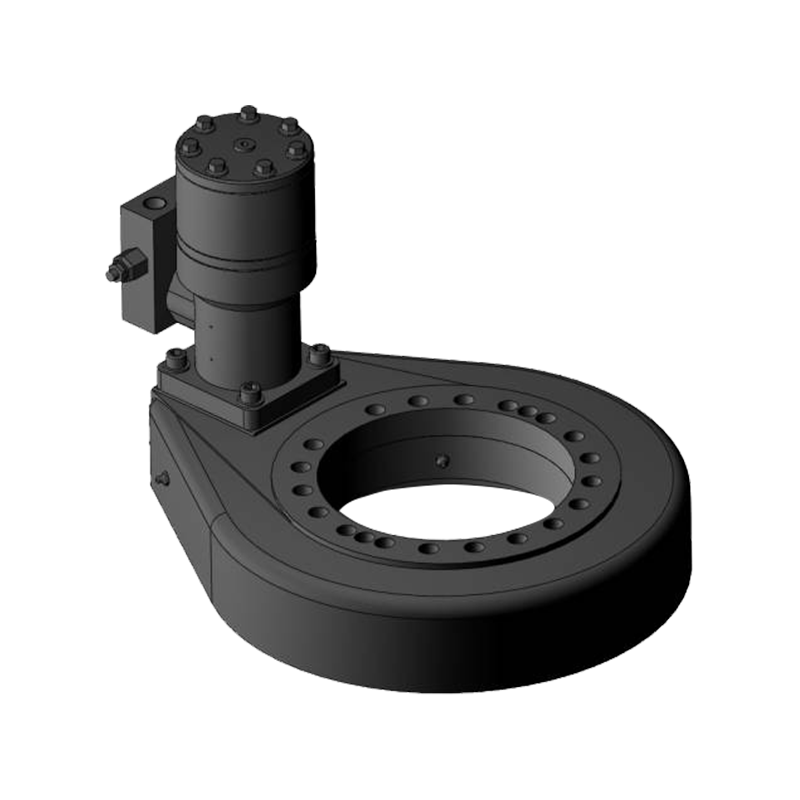
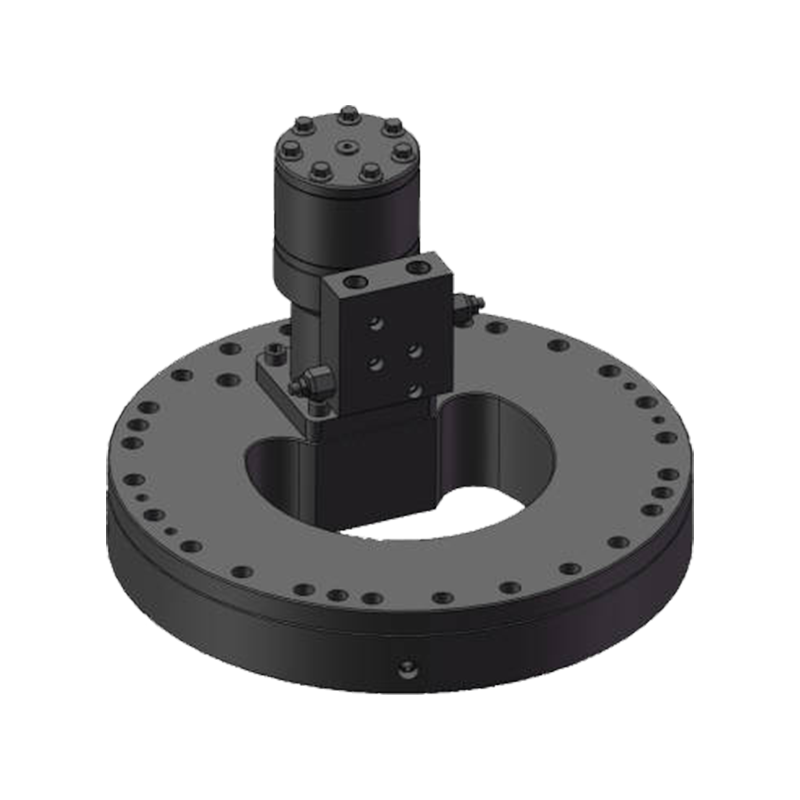
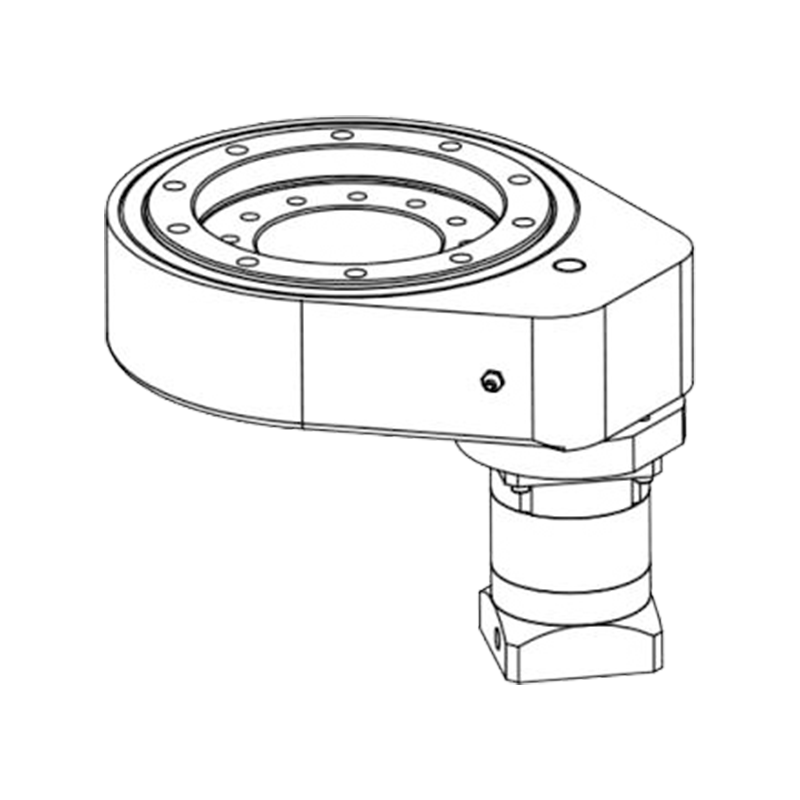
Poziomy napęd obrotu to całkowicie zamknięty siłownik obrotowy, który łączy mechanizm redukcyjny przekładni ślimakowej z łożyskiem wieńcowym w jednej zintegrowanej obudowie. Pierścień obrotowy wytrzymuje obciążenia promieniowe, osiowe i momentowe nałożone przez znajdującą się powyżej konstrukcję obrotową, podczas gdy przekładnia ślimakowa zapewnia przewagę mechaniczną niezbędną do napędzania tego obrotu przy stosunkowo niewielkim wkładzie silnika. „Pozioma” odnosi się do orientacji osi wyjściowej napędu — obrót odbywa się wokół osi pionowej, co czyni ją naturalnym wyborem w zastosowaniach, w których konstrukcja musi się wahać, przesuwać lub stale obracać w płaszczyźnie poziomej.
W przeciwieństwie do samodzielnych pierścieni obrotowych w połączeniu z zewnętrznymi przekładniami, zintegrowany poziomy napęd obrotu upraszcza instalację, poprawia integralność uszczelnienia i zmniejsza wysiłek inżynieryjny wymagany do zaprojektowania otaczającej konstrukcji. Właśnie dzięki tej integracji dominują w takich zastosowaniach, jak urządzenia śledzące energię słoneczną, obrotnice dźwigów, platformy do robót wysokościowych, systemy odchylania turbin wiatrowych i pozycjonery anten satelitarnych – wszędzie tam, gdzie wymagany jest kompaktowy, niezależny napęd obrotowy o dużej nośności.
Analiza obciążenia: niepodlegający negocjacjom punkt wyjścia
Każdy wybór napędu obrotu poziomego rozpoczyna się od pełnej analizy obciążenia. Pomijanie lub przybliżanie tego kroku jest najczęstszą przyczyną przedwczesnych awarii. Istnieją trzy kategorie obciążeń, które przemiennik musi wytrzymać jednocześnie i wszystkie trzy należy określić ilościowo przed rozpoczęciem jakiegokolwiek porównania katalogowego.
Obciążenie osiowe
Obciążenie osiowe działa równolegle do osi wyjściowej napędu — w poziomym napędzie obrotowym jest to zazwyczaj ciężar własny konstrukcji obrotowej znajdującej się powyżej. Układ paneli słonecznych, nadbudowa obrotnicy dźwigu lub zespół anteny wywierają swój ciężar w dół przez napęd. Jest to obciążenie najłatwiejsze do obliczenia: jest to zasadniczo całkowita masa wszystkiego, co obraca się nad napędem, pomnożona przez przyspieszenie grawitacyjne i wyrażona w kiloniutonach.
Obciążenie promieniowe
Obciążenie promieniowe działa prostopadle do osi wyjściowej – poziomo w przypadku poziomego napędu obrotowego. Napór wiatru na duży panel lub antenę jest najczęstszym źródłem obciążenia promieniowego w zastosowaniach zewnętrznych. Mimośrodowe obciążenie spowodowane przesunięciem środka ciężkości w zespole obrotowym również ma wpływ na składową promieniową. Obciążenia promieniowe są często dynamiczne i zmienne kierunkowo, co sprawia, że krytyczne znaczenie ma oszacowanie wartości szczytowej, a nie obliczenie wartości średniej.
Przewracający moment
Moment wywracający to obciążenie zginające, które powoduje przechylenie konstrukcji obrotowej względem obudowy napędu. Jest on generowany, gdy środek ciężkości zespołu obrotowego nie znajduje się bezpośrednio nad osią obrotu napędu lub gdy siły poziome (takie jak wiatr) działają na wysokości nad płaszczyzną montażu napędu. Moment wywracający wyrażany jest w kiloniutonometrach i jest często najbardziej wymagającym parametrem obciążenia — wiele napędów, które pomyślnie przeszły kontrolę obciążenia osiowego i promieniowego, nie osiąga wytrzymałości na moment wywracający.
Wymagania dotyczące momentu obrotowego i dobór silnika
Po ustaleniu obciążeń należy obliczyć wymagany wyjściowy moment obrotowy. Jest to moment obrotowy potrzebny na pierścieniu wyjściowym napędu, aby pokonać wszystkie siły oporu i rozpędzić obciążenie do wymaganej prędkości obrotowej w akceptowalnym czasie. Głównymi czynnikami wpływającymi na wymagany moment obrotowy są tarcie w łożysku wieńcowym (które zwiększa się wraz z obciążeniem osiowym i momentem wywracającym), opór aerodynamiczny działający na konstrukcję obrotową oraz moment bezwładności wymagany w fazach przyspieszania.
Napędy obrotu poziomego są określone przez ich znamionowy moment trzymania i znamionowy moment roboczy — to nie są te same wartości. Moment trzymania to maksymalne obciążenie statyczne, jakie przemiennik może wytrzymać bez obrotu; moment roboczy to ciągły moment obrotowy dostępny podczas pracy. Charakterystyka samoblokująca przekładni ślimakowej (występująca, gdy kąt wyprzedzenia jest mniejszy od kąta tarcia, zwykle gdy przełożenie przekładni przekracza około 20:1) oznacza, że wiele poziomych napędów obrotu może utrzymać swoje położenie pod obciążeniem bez oddzielnego hamulca — cecha, która upraszcza projektowanie systemu w zastosowaniach takich jak trackery słoneczne, gdzie przemiennik musi utrzymać kąt panelu pod obciążeniem wiatrem bez ciągłego zasilania silnika.
Dobór silnika następuje na podstawie wymaganego momentu wejściowego (wyjściowy moment obrotowy podzielony przez przełożenie przekładni, dostosowane do sprawności napędu) i wymaganej prędkości wejściowej (wyjściowa prędkość obrotowa pomnożona przez przełożenie przekładni). Większość napędów obrotu poziomego współpracuje ze standardowymi silnikami ramowymi IEC lub NEMA, a wiele z nich jest dostarczanych w stanie gotowym do montażu silnika z obrobionym maszynowo kołnierzem montażowym silnika.
Porównanie kluczowych parametrów wyboru
| Parametr | Co ustalić | Wspólny zakres | Ryzyko wyboru, jeśli nie jest określone |
| Obciążenie osiowe Capacity | Całkowita masa wirująca × siła ciężkości | 5 kN – 2000 kN | Deformacja bieżni łożyska, zatarcie |
| Przewracający moment | Obciążenie mimośrodowe × ramię momentowe | 0,5 kNm – 500 kNm | Uszkodzenie zęba koła koronowego, przechylenie |
| Roboczy moment obrotowy | Moment bezwładności tarcia | 0,5 kNm – 200 kNm | Przeciążenie silnika, zużycie przekładni ślimakowej |
| Prędkość wyjściowa | Wymagana prędkość narastania (°/min lub obr./min) | 0,01 – 10 obr./min | Błąd pozycjonowania, przekroczenie temperatury |
| Przełożenie | Potrzeba samoblokowania a wydajność | 20:1 – 100:1 | Jazda tyłem, konieczność hamowania |
Względy środowiskowe i cykl pracy
Napęd spełniający wymagania dotyczące obciążenia mechanicznego zapisane na papierze może nadal ulec przedwczesnej awarii, jeśli specyfikacja środowiskowa jest nieprawidłowa. Napędy obrotu poziomego są szeroko stosowane na zewnątrz, często w trudnych warunkach, a obudowa, uszczelnienie i obróbka powierzchni muszą być dopasowane do środowiska pracy.
- Ocena IP: W przypadku zastosowań zewnętrznych ogólnie wymagany jest stopień ochrony IP65, aby zapobiec przedostawaniu się strumieni pyłu i wody. Środowiska morskie lub przybrzeżne wymagają stopnia ochrony IP67 lub wyższego, z elementami złącznymi ze stali nierdzewnej i dodatkową ochroną antykorozyjną na odsłoniętych powierzchniach. Upewnij się, że stopień ochrony IP dotyczy w pełni zmontowanego przemiennika, łącznie z interfejsem silnika — niektóre przemienniki mają stopień ochrony IP65 na obudowie, ale mają niezabezpieczone powierzchnie montażowe silnika, które stają się punktami wnikania.
- Zakres temperatur: Standardowe smary dobrze sprawdzają się w temperaturach od -20°C do 80°C. Zastosowania w środowiskach arktycznych, instalacjach pustynnych lub w pobliżu przemysłowych źródeł ciepła wymagają określonych smarów niskotemperaturowych lub wysokotemperaturowych. Przed sfinalizowaniem wyboru do zastosowań w ekstremalnych warunkach klimatycznych, należy sprawdzić specyfikację środka smarnego producenta napędu oraz zakres temperatur, jaki obejmuje.
- Cykl pracy: Napędy obrotu poziomego in solar tracking applications typically operate intermittently — a brief movement every few minutes — placing low thermal demands on the worm gear assembly. Drives used in continuous-rotation applications such as antenna positioners or turntables face much higher thermal loads and require duty cycle ratings (expressed as operating time percentage) that match the application. Exceeding the duty cycle rating leads to lubricant degradation and accelerated worm gear wear.
- Ochrona przed korozją: W napędach standardowych zastosowano obudowy stalowe gruntowane fosforanem cynku i malowane, odpowiednie dla środowisk śródlądowych. Instalacje przybrzeżne i morskie wymagają obudów ocynkowanych ogniowo, pierścieni wyjściowych ze stali nierdzewnej lub powierzchni pokrytych żywicą epoksydową, w zależności od kategorii korozyjności miejsca.
Konfiguracja montażu i geometria interfejsu
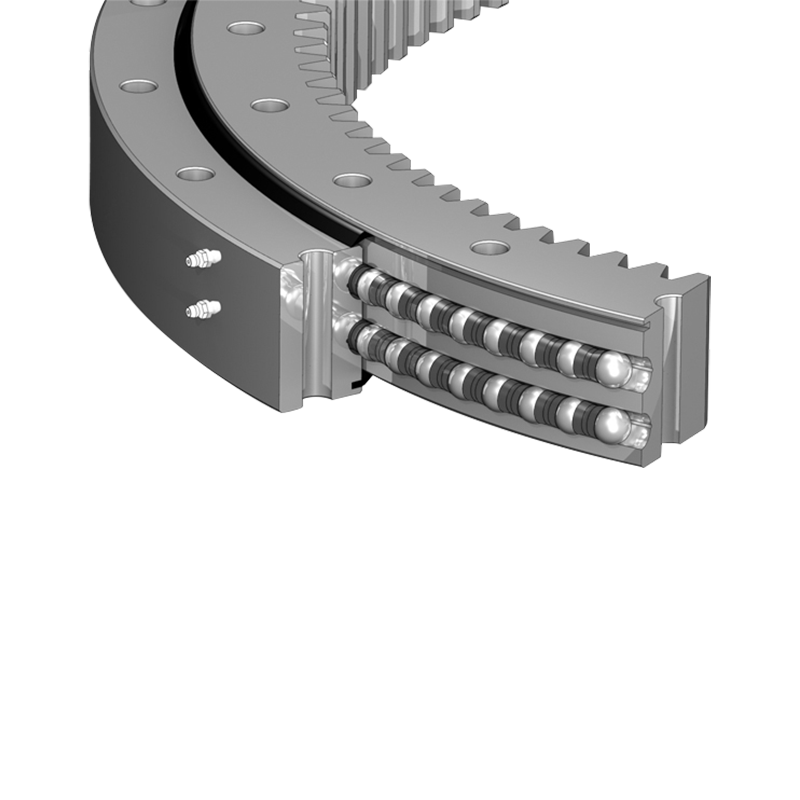
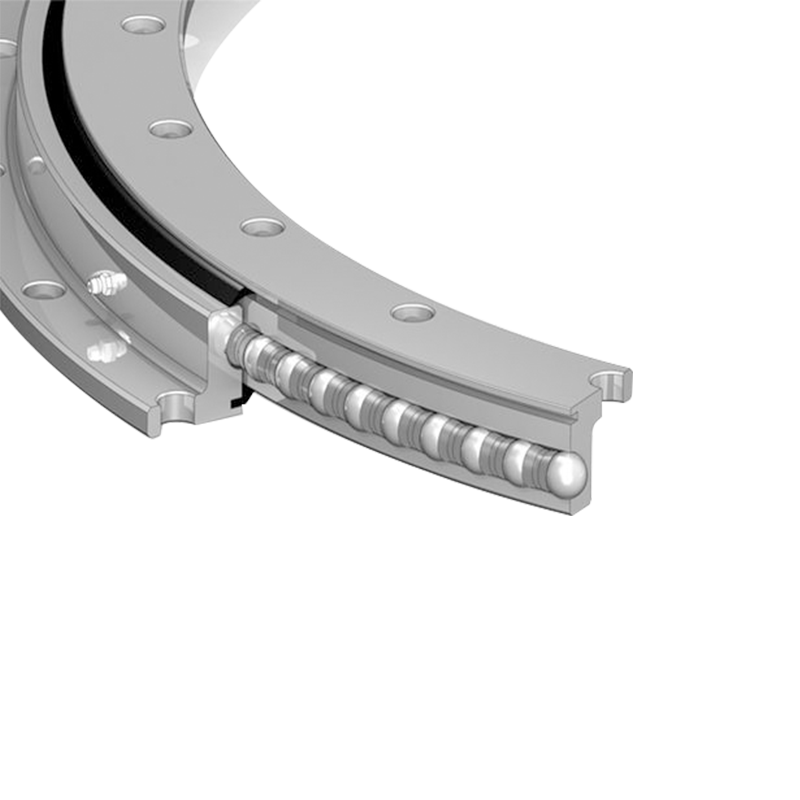
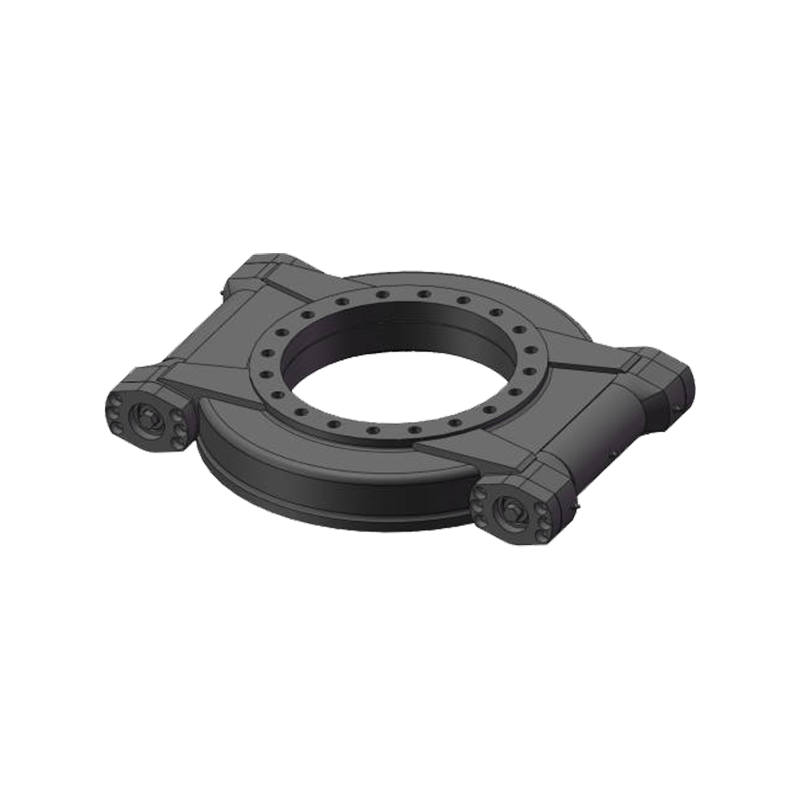
Fizyczna integracja napędu obrotowego z otaczającą konstrukcją jest praktycznym ograniczeniem, które należy rozwiązać podczas wyboru, a nie podczas instalacji. Napędy obrotu poziomego są dostępne w różnych konfiguracjach pierścieni wyjściowych — z przekładnią zewnętrzną (zęby na zewnątrz pierścienia wyjściowego), przekładnią wewnętrzną (zęby od wewnątrz) i bezzębną (napędzaną ciernie lub połączenie bezpośrednie) — każda dostosowana do różnych układów kinematycznych. Najbardziej popularne są zewnętrzne pierścienie wyjściowe przekładni, które umożliwiają umieszczenie wału ślimakowego poza średnicą pierścienia, zapewniając dostęp do silnika i skrzyni biegów w celu konserwacji. Konfiguracje przekładni wewnętrznych są stosowane, gdy napęd musi być zintegrowany w kompaktowym zespole obrotowym.
Wymiary okręgu śrubowego zarówno na obudowie stałej, jak i na obrotowym pierścieniu wyjściowym należy sprawdzić w odniesieniu do współpracującej konstrukcji. Wielu producentów oferuje niestandardowe wzory śrub, kołnierze montażowe i interfejsy wału wyjściowego jako opcje standardowe — określenie ich na etapie zamawiania jest znacznie tańsze niż obróbka adapterów w terenie. Sprawdź także średnicę otworu przelotowego, jeśli kable, przewody hydrauliczne lub węże pneumatyczne muszą przechodzić przez środek napędu — nie wszystkie poziome napędy obrotowe mają otwór centralny i modernizacja tej funkcji nie jest możliwa.

Współczynniki bezpieczeństwa i oczekiwany okres użytkowania
Opublikowane obciążenia znamionowe napędów obrotu poziomego opierają się zazwyczaj na obliczeniach statycznego obciążenia próbnego lub dynamicznej trwałości zmęczeniowej, a stosowanie odpowiedniego współczynnika bezpieczeństwa powyżej obliczonego obciążenia roboczego jest standardową praktyką inżynierską. W przypadku większości zastosowań niemających krytycznego znaczenia dla bezpieczeństwa odpowiedni jest współczynnik bezpieczeństwa od 1,5 × do 2 × dla momentu roboczego i nośności. W przypadku zastosowań, w których awaria napędu stwarza ryzyko dla personelu — podnośniki koszowe, medyczny sprzęt do pozycjonowania lub żurawie montowane na pojazdach — można określić współczynniki bezpieczeństwa co najmniej 3x, a certyfikacja strony trzeciej zgodna z odpowiednimi normami bezpieczeństwa maszyn (takimi jak EN 13000 dla dźwigów lub ISO 11684 dla sprzętu rolniczego) powinna zostać potwierdzona u producenta napędu.
Oczekiwaną trwałość użytkową należy omawiać w kontekście trwałości łożyska L10 (liczby godzin pracy, po której można spodziewać się, że 10% populacji identycznych napędów wykaże awarię zmęczeniową łożyska) oraz trwałości zmęczeniowej powierzchni przekładni ślimakowej. W przypadku zastosowań związanych z śledzeniem nasłonecznienia normą branżową jest 25-letni okres użytkowania; potwierdzić, że obliczenia trwałości L10 producenta opierają się na rzeczywistym profilu obciążenia roboczego aplikacji, a nie na ogólnych warunkach odniesienia.
Praktyczna lista kontrolna przed sfinalizowaniem wyboru
- Potwierdź obciążenie osiowe, szczytowe obciążenie promieniowe i maksymalny moment wywracający w najgorszych warunkach (zwykle maksymalna prędkość wiatru w połączeniu z maksymalnym obciążeniem mimośrodowym)
- Sprawdź, czy znamionowy moment roboczy wybranego napędu przekracza obliczony wymagany wyjściowy moment obrotowy o wybrany współczynnik bezpieczeństwa
- Sprawdź przełożenie przekładni pod kątem samoblokowania, jeśli wymagane jest pasywne utrzymywanie pozycji, lub sprawdź specyfikację hamulca, jeśli nie jest
- Upewnij się, że stopień ochrony IP, zakres temperatur i ochrona antykorozyjna odpowiadają środowisku instalacji
- Sprawdź wymiary rozstawu śrub, konfigurację pierścienia wyjściowego i wymagania dotyczące otworu centralnego w stosunku do projektu konstrukcji współpracującej
- Poproś o obliczenie trwałości łożyska L10 w oparciu o rzeczywisty profil obciążenia aplikacji, a nie warunki odniesienia z katalogu
- Potwierdź zgodność interfejsu silnika — rozmiar ramy, średnica wału i standard kołnierza montażowego (IEC lub NEMA)
- Sprawdź specyfikację smarowania i częstotliwość ponownego smarowania w porównaniu z planowanym harmonogramem konserwacji
Dobór napędu obrotu poziomego nagradza metodyczną analizę. Same dyski to solidne, dobrze sprawdzone komponenty — awarie występujące w terenie prawie zawsze można powiązać z niedookreślonym parametrem obciążenia, niedopasowanymi parametrami środowiskowymi lub przeoczonymi ograniczeniami interfejsu. Systematycznie analizuj każdą z powyższych zmiennych, korzystaj ze wsparcia inżynieryjnego producenta, gdy warunki zastosowania są nietypowe, a efektem będzie napęd, który będzie działał niezawodnie przez cały zamierzony okres użytkowania zasilanego systemu.

Jiangsu Manchen Transmission Technology Co., Ltd. wyróżnia się tworzeniem niestandardowych, niezawodnych i precyzyjnych łożysk dla różnych branż, nieustannie wprowadzając innowacje w celu spełnienia najwyższych standardów i szukając możliwości współpracy. Niezawodny i stabilny dostawca łożysk w Chinach.
Szybkie linki
Linki produktów
Skontaktuj się z nami
-
Address:Nr 8, Nanqiu Road, Huangtu Town, Jiangyin City, Chiny
-
Tel:+86-13646122221
-
E-mail:
-
E-mail:ma@slewingbearingcn.com
Prawa autorskie © Jiangsu Manchen Transmission Technology Co., Ltd..
